We became so absorbed by the digital world while building ArchiHUB that, when we started working on our weather stations, we realized we needed to reconnect our work with the physical world.
And because we love everything RC (who doesn’t?) we decided to build our own aircraft platform.
Today, we are sharing the ongoing development of our fixed-wing unmanned aerial vehicle (UAV).

Our approach to building it is deeply iterative. In this first stage, the goal is to operate efficiently using commercial cameras for photogrammetry. Eventually, we will scale the system’s capabilities to include LiDAR sensors. Rather than trying to build the perfect machine at once, we are creating a foundation that can evolve alongside our needs.
Our first prototype provided invaluable lessons on structural integrity, mass distribution, and real-world flight dynamics. That maiden flight ultimately culminated in a critical system failure as it normaly do. But we took those lessons back to the drawing board for Version 2, this time backing our hardware decisions with rigorous fluid dynamics and stability analysis.
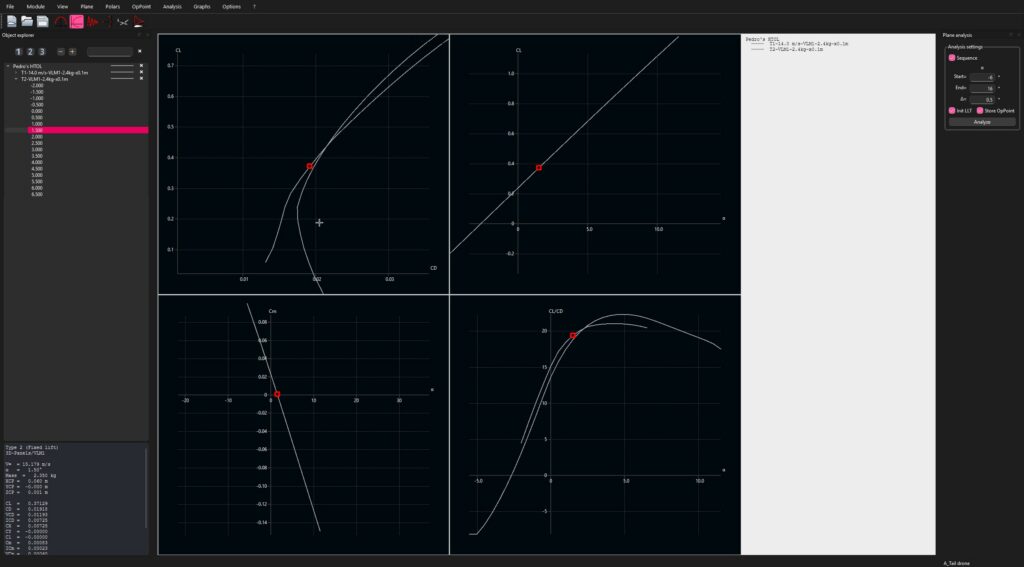
In practice, this meant moving our design workflow to XFLR5. The system evaluates airfoil behavior and calculates stability derivatives in the low-speed regime. It processes these variables iteratively to optimize aerodynamic efficiency, ensuring the drone can support the weight of our capture modules without compromising its center of gravity.
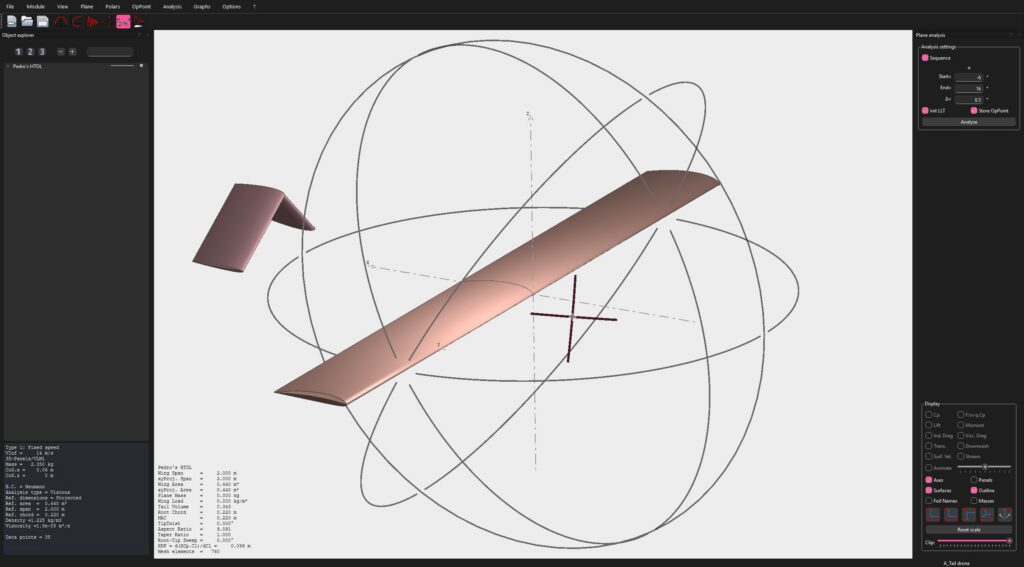
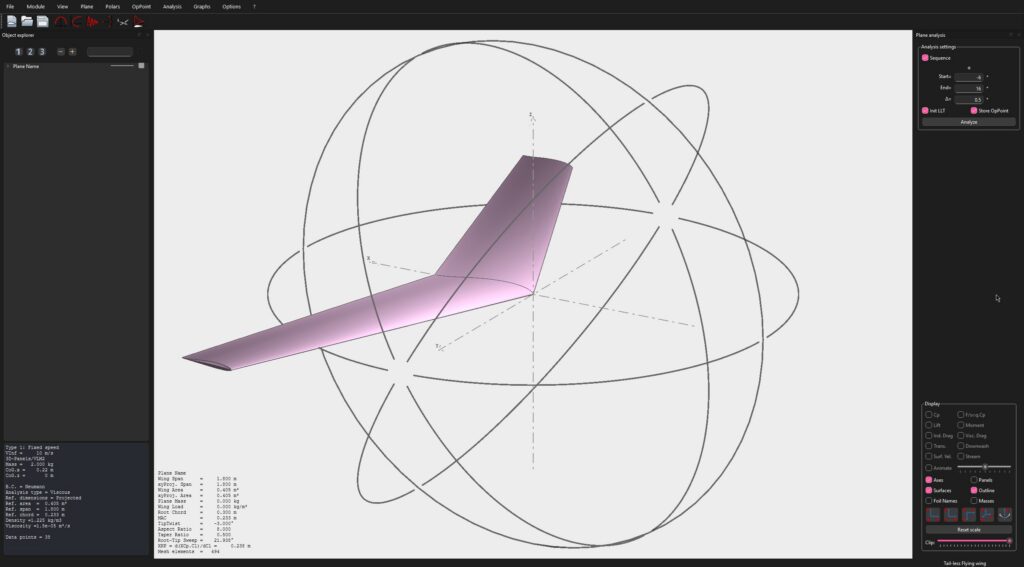
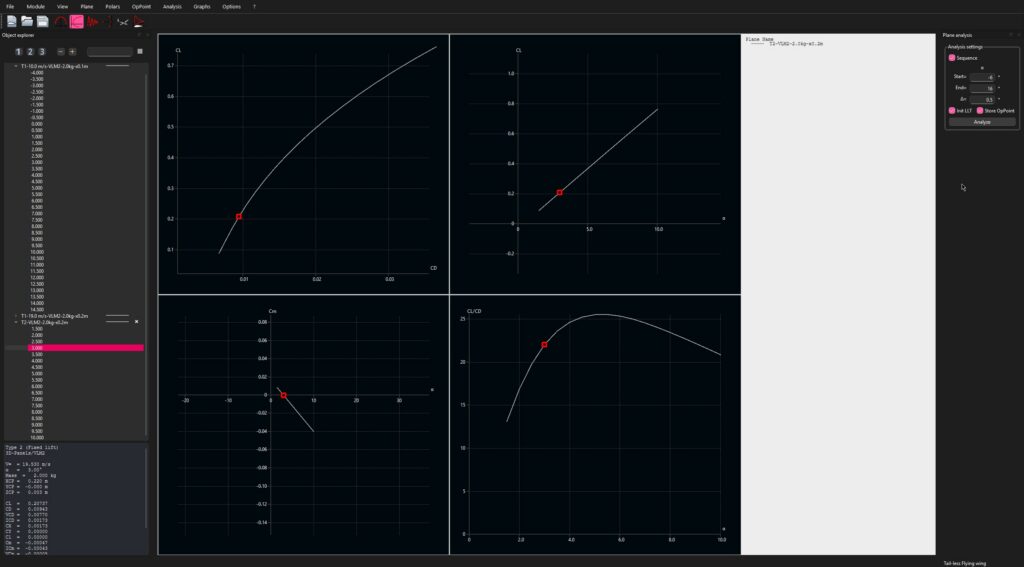
This approach is deeply rooted in the physical demands of large-area mapping. We refined the wing geometry with a 2-meter wingspan and a 30 cm root chord, providing the exact wing area and lift required for our payloads while minimizing stall risks at low speeds. Rather than inventing complex solutions, we attempted to surface the most efficient design: a A-tail configuration that reduces parasite drag, and a hybrid structure of lightweight materials combined with internal ribs and modular supports 3D-printed in PETG. In parallel, we are reviewing other configurations (such as the flying wing) to eventually migrate to systems that are more complex to build but more efficient in flight.
A crucial element of this architecture is its power and propulsion. The platform utilizes a “pusher” configuration to leave the nose completely clear for optical instruments, driven by a 10400mAh battery designed to keep the exploration grounded in extended, reliable flight times.
We’ll keep you posted on our mishaps, crashes, lessons learned, and our eventual success.
Until next time, and hopefully until our first successful photogrammetry reconstruction.